1. OpenV2X 简介
OpenV2X 通过 AI 智慧模块提供车路协同“路侧”解决方案,构建协作式的智慧交通,为交通监管部门提供全路段的数据感知融合服务、以及全天候和全过程通行管控能力。
- 在“云-边-端”三层架构中,OpenV2X 主要关注“远边”(5G/6G 基站侧边缘云计算),以及基于通用硬件的“近边”(RSU 工控机)计算,不涉及软硬件耦合的 RSU 工控机部分。
- 在“车路协同”框架中,OpenV2X 只关注“路侧”开放基础架构,不涉及“车载”部分。
2022 年 6 月 30 日,OpenV2X Albany 版本发布,Albany 版本提供了路侧设备(RSU、毫米波雷达、摄像头)管理及 MAP 配置,事件管理中包含了路侧单元信息 RSI、路侧单元消息 RSM、逆向超车预警三种事件信息,可通过云控大屏的查看车辆预警信息及设备在线率。
2022 年 11 月 18 日,OpenV2X Beihai 版本发布。Beihai 版本新增了信号灯和激光雷达设备管理及在线率展示,另外,在大屏界面,可通过点击摄像头/激光雷达图标,查看摄像头视频/雷达点云图,了解道路和车辆行驶情况。事件算法方面,新增了弱势交通参与者碰撞预警、交叉路口碰撞预警、感知数据共享、协作式变道四个典型 V2X 事件场景算法。
2023 年 06 月 01 日,OpenV2X Columbia 版本发布。
2. OpenV2X Columbia 版本功能介绍
2.1 OpenV2X Columbia 版本简介
- OpenV2X Columbia 版本将之前使用的 Edgeview 和 Centerview 合并为 Omega
- 支持监管多边缘站点,通过切换边缘站点,对各边缘下的设备及事件数据进行管理
- 采用新的部署架构
- 支持调用外部算法
2.2 功能列表
| 功能点 | Albany 版本 | Beihai 版本 | Columbia 版本 |
|---|---|---|---|
| RSU 设备管理 | ✅ | ✅ | ✅ |
| 摄像头设备管理 | ✅ | ✅ | ✅ |
| 毫米波雷达设备管理 | ✅ | ✅ | ✅ |
| 信号灯设备管理 | ❌ | ✅ | ✅ |
| 激光雷达设备管理 | ❌ | ✅ | ✅ |
| 雷视一体机设备管理 | ❌ | ❌ | ✅ |
| MAP 配置 | ✅ | ✅ | ✅ |
| RSU 信息上报、日志下发配置 | ✅ | ✅ | ✅ |
| 多边缘站点管理 | ❌ | ❌ | ✅ |
| 事件管理 - 路侧单元信息 RSI | ✅ | ✅ | ✅ |
| 事件管理 - 路侧单元消息 RSM | ✅ | ✅ | ✅ |
| 事件管理 - 逆向超车预警 | ✅ | ✅ | ✅ |
| 事件管理 - 弱势交通参与者碰撞预警 | ❌ | ✅ | ✅ |
| 事件管理 - 交叉路口碰撞预警 | ❌ | ✅ | ✅ |
| 事件管理 - 感知数据共享 | ❌ | ✅ | ✅ |
| 事件管理 - 协作式变道 | ❌ | ✅ | ✅ |
| 事件管理 - 车辆逆行预警 | ❌ | ❌ | ✅ |
| 事件管理 - 前方拥堵预警 | ❌ | ❌ | ✅ |
| 事件管理 - 车辆限速预警 | ❌ | ❌ | ✅ |
| 事件管理 - 车辆慢速提醒 | ❌ | ❌ | ✅ |
| RSU 设备在线率 | ✅ | ✅ | ✅ |
| 摄像头设备在线率 | ✅ | ✅ | ✅ |
| 毫米波雷达设备在线率 | ✅ | ✅ | ✅ |
| 激光雷达设备在线率 | ❌ | ✅ | ✅ |
| 信号灯设备在线率 | ❌ | ✅ | ✅ |
| 雷视一体机设备在线率 | ❌ | ❌ | ✅ |
| 摄像头视频展示 | ❌ | ✅ | ✅ |
| 激光雷达点云图展示 | ❌ | ✅ | ✅ |
| 算法平台 | ❌ | ❌ | ✅ |
| 服务指引 | ❌ | ❌ | ✅ |
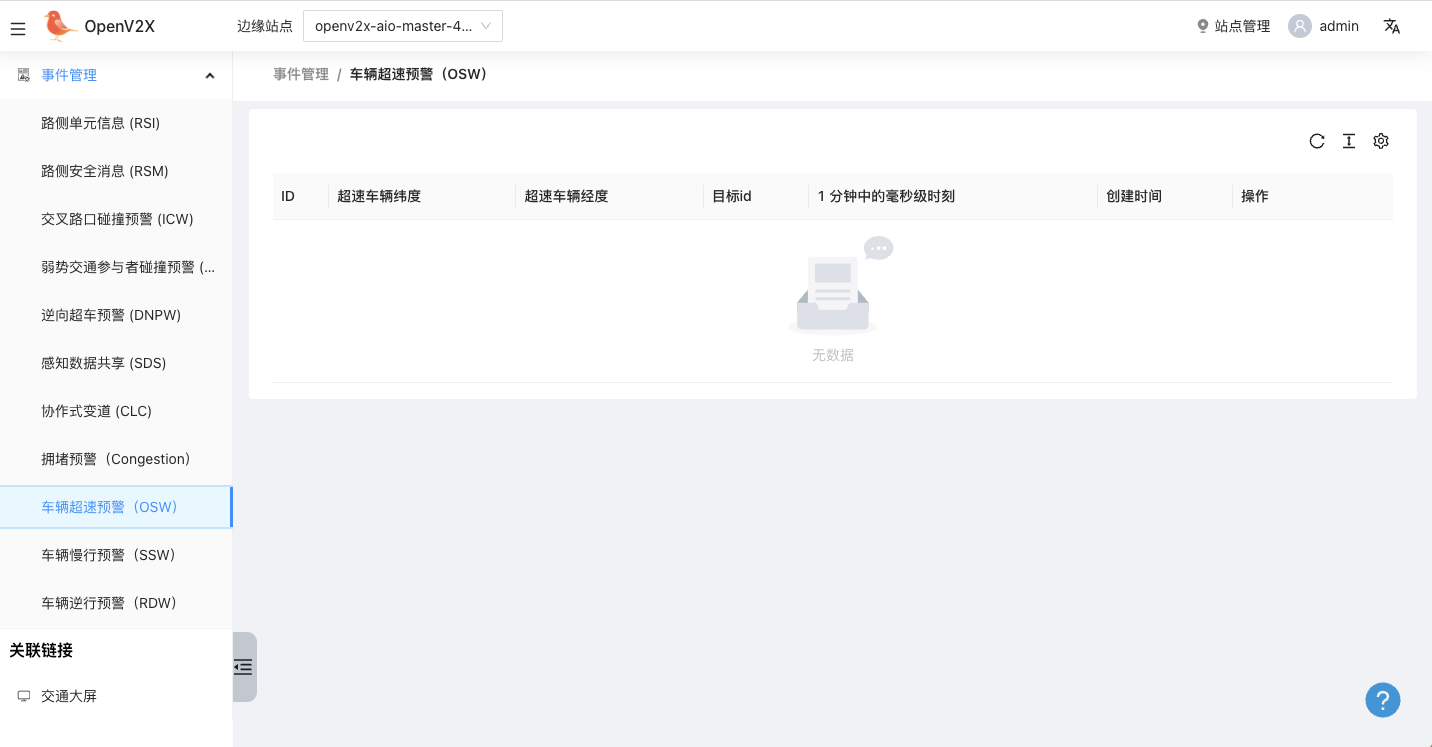
2.3 事件管理模块
增加了车辆逆行预警、车辆慢行预警、前方拥堵预警、车辆限速预警,目前 OpenV2X 已支持 9 种算法场景,其中逆向超车预警、弱势交通参与者碰撞预警、交叉路口碰撞预警、感知数据共享、协作式变道、前方拥堵预警、车辆限速预警属于《合作式智能运输系统车用通信系统应用层及应用数据交互标准》定义的 V2X 典型应用场景。
2.3.1 前方拥堵算法
前方拥堵算法是一种解决无不明原因的交通拥堵算法,即道路状况良好,没有发生交通事故条件下,只是因为车速波动导致的交通拥堵。计算该段道路上行驶车辆的平均速度,同时通过基础地图数据获取该段道路的设计时速,计算行驶车辆的平均速度和设计时速的比率,计算出当前路口的拥堵等级,通过 RSU 向周边车辆发送拥堵信息。具体实现逻辑如下:
- 拥堵级别:目前分为3级,
- 取值范围:
- 拥堵级别低,速度[25, 30) 单位:km/h
- 拥堵级别中,速度[15,25) 单位:km/h
- 拥堵级别高,速度[0, 15) 单位:km/h
- 通过计算车道车辆平均速度,在根据拥堵级别对应的取值范围判断车道的拥堵级别。目前软件计算拥堵算法元素相对较少。故而会结合感知设备提供的信息:排队长度、排队车辆总数、队列平均车速、车道内静止排队车辆数、车道内动态排队车辆数,默认速度低于 35km/h 等各种信息来完善拥堵算法,从而提高拥堵算法的可靠性。
2.3.2 车辆超速算法
超速行驶是指驾驶员在驾车行驶中,以超过法律、法规规定的速度进行行驶的行为。每个路段都有允许的速度取值范围。监测到对应路段上车辆 speed 在正常行驶速度范围之外的车辆(低于正常速度范围即慢行;超过正常速度范围即超速),并且记录轨迹信息,并向周围车辆发送预警信息。 首先可以从 MAP 地图中获取每个车道的最大限速标准,如下:
SpeedLimitType ::= ENUMERATED {
unknown, -- Speed limit type not available
maxSpeedInSchoolZone, -- Only sent when the limit is active
maxSpeedInSchoolZoneWhenChildrenArePresent, -- Sent at any time
maxSpeedInConstructionZone, -- Used for work zones, incident zones, etc. -- where a reduced speed is present
vehicleMinSpeed,
vehicleMaxSpeed, -- Regulatory speed limit for general traffic
vehicleNightMaxSpeed,
truckMinSpeed,
truckMaxSpeed,
truckNightMaxSpeed,
vehiclesWithTrailersMinSpeed,
vehiclesWithTrailersMaxSpeed,
vehiclesWithTrailersNightMaxSpeed,
..
}
其次通过运动学差分公式以及计算估值的计算方式计算车道上每辆车辆的运动学速度,过滤出运动学速度大于车道最大限速标准的车辆,得出超速的车辆,将超速车辆的经纬度信息通过 RSU 向周边车辆发送预警信息。
2.3.3 车辆慢行算法
慢行行驶是指低于正常速度范围行驶的车辆,过慢的行驶速度容易导致各种不良影响:注意力不集中、易疲劳,容易发生追尾事故,易造成道路拥堵等,慢行算法是一种通过计算车辆运动学速度筛选慢行车辆,然后通过 RSU 向周边车辆发送预警信息。
首先可以从 MAP 信息中获取车道的各种车型最小限速标准,如果车道信息上没有限速标准,则不进行筛选慢行小车。其次通过运动学差分方式以及计算均值的计算方式计算车道上每辆车辆的运动学速度,过滤出运动学速度小于车道最大限速标准的车辆,将慢行车辆的信息通过 RSU 向周边车辆发送预警消息。
2.3.4 车辆逆行算法
逆行算法是一种通过分析车辆位置信息来检测车辆是否逆向行驶的方法。
首先,根据车辆的坐标信息以及地图信息定义的有向车道,在路口中心原点处确定一个参考点,计算车辆到该参考点的距离。然后,根据车辆运动方向和车道规定行驶方向,判断车辆应该是驶向路口还是远离路口。接着,通过对车辆距离参考点的距离变化趋势进行分析,如果车辆距离参考点逐渐变小,则说明车辆正向路口靠近;反之,如果车辆距离参考点逐渐变大,则说明车辆正在远离路口。最后,根据车道线箭头指向路口的方向,结合距离变化趋势,判断车辆是否存在逆向行驶的情况。
在具体实现时,逆行算法需要考虑多种因素,例如车辆位置的精度、路口形状的复杂程度、路口内车辆数量的多少等。为了提高算法的准确性和实时性,需要对算法进行优化和改进。其中,通过对车辆位置信息进行滤波处理,可以有效减少由于位置抖动和误差造成的干扰。同时,可以考虑引入其他传感器数据,例如车速、加速度等信息,来辅助判断车辆运动状态。另外,在路口拓扑结构复杂的情况下,可以采用多级检测和分类的方法,分别对车辆在不同路段的运动状态进行分析,以提高算法的鲁棒性和可靠性。
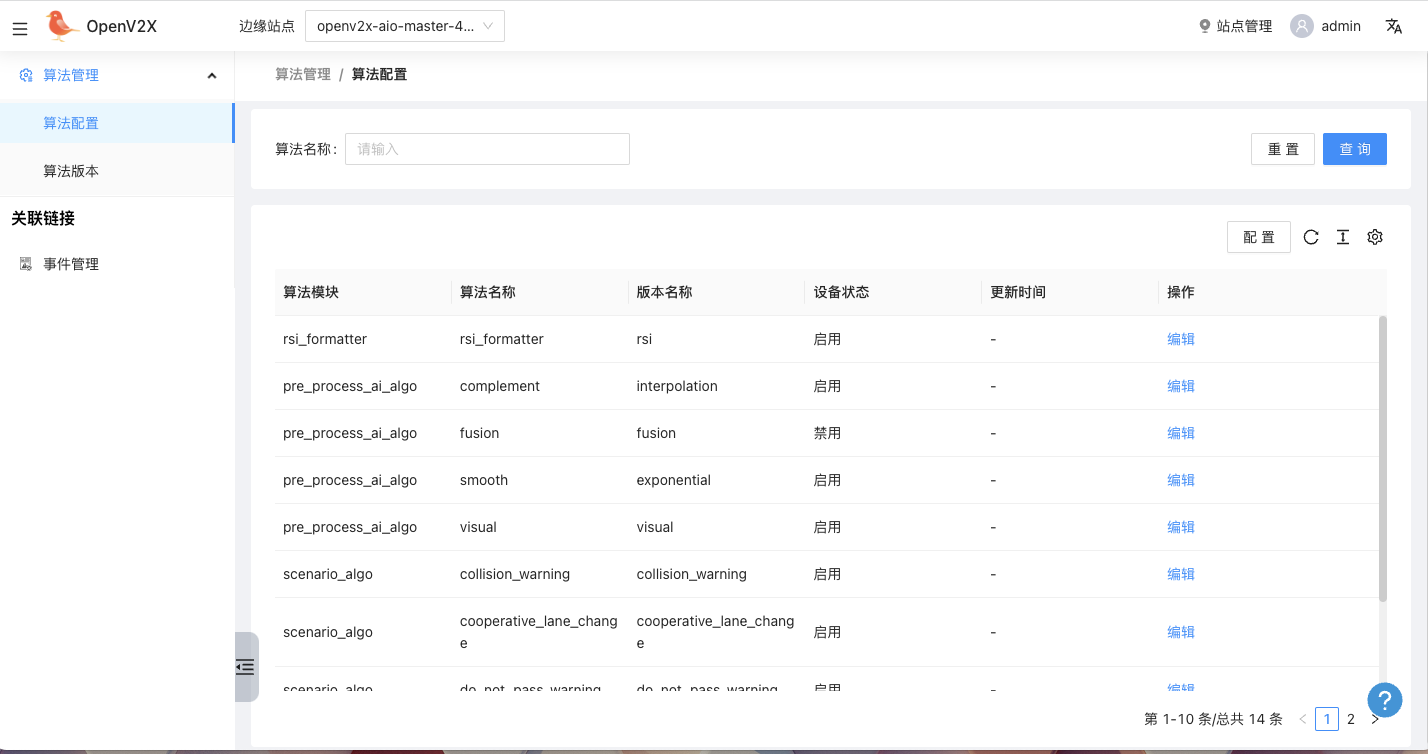
2.4 算法平台
Beihai 版本中,Cerebrum 中内置了数据预处理、数据融合、和各类场景算法。
Columbia 版本中,OpenV2X 基于“简单、可扩展”原则,对算法模块作如下设计:
- 算法服务可以在中心端配置,下发到边缘(特定算法服务在特定边缘启动)
- 在 Dandelion 中实现服务注册和服务发现 API
- 服务对象字段包含:协议地址、服务名称、服务类型、服务描述、服务 ID,和可选属性:协议类型、认证方式、认证密钥等
- 其他模块,比如 Cerebrum 需要调用外置算法时,可以先从 Dandelion 的服务发现 API 了解服务详情,然后再通 Dandelion 或者服务自身的接口完成自身流程中的算法选择,完成配置。
- 当数据接入,Cerebrum 等模块会根据配置通过服务端点,将数据安装服务协议标准发送各个服务中(内嵌或外置)
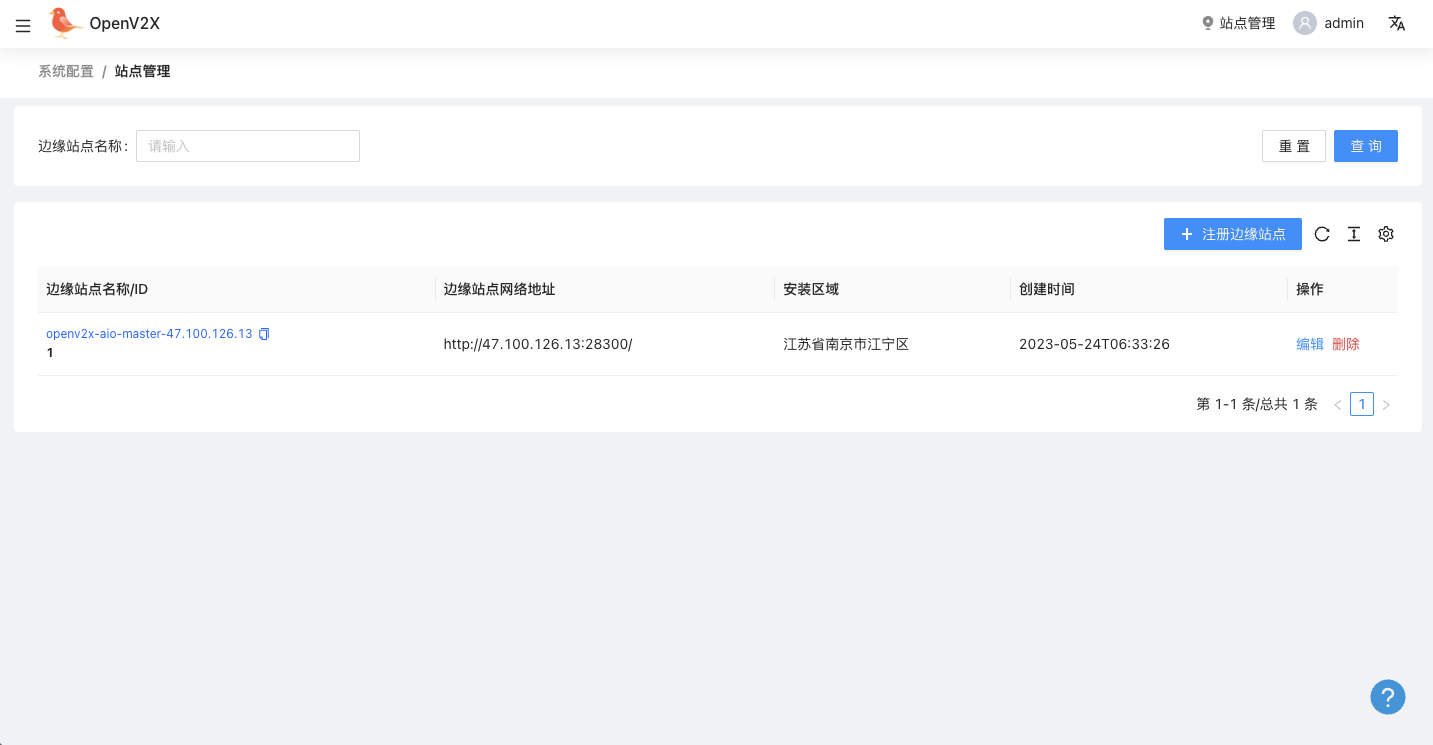
2.5 多边缘站点管理
OpenV2X 提供了多边缘站点管理功能,部署好路侧设备后,可通过边缘站点注册功能,将边缘站点与中心连接。在 Omega 界面切换站点,可管理不同站点的设备及事件。
2.6 模拟路口
使用某路口的同一时间戳的视频和激光雷达点云数据,进入模拟站点大屏后,可查看与点云数据及视频里车辆行驶轨迹一致的 2D 小车。实现逻辑为:udp_client 发送非结构化点云数据到 lidar 服务,lidar 服务会将原始点云数据处理成结构化数据通过 Websocket 发送前端渲染 3D 点云,并同时将原始点云数据输入激光雷达目标检测算法(centernet),输出结构化目标数据,通过 MQTT 传输至前端进行渲染 2D 小车。
该功能在持续优化中,欢迎大家参与代码贡献~

结语
OpenV2X 开源项目计划实现设备、GIS 和综合可视化管理等多个功能,后续版本会继续覆盖 V2X 典型应用场景及设备感知融合算法。 OpenV2X 开源项目希望通过提供信息服务、保障交通安全、提高交通效率、实现自动驾驶等功能,打造智能交通数字基础,支撑智慧公交、无人驾驶清扫车、无人驾驶货运卡车等典型应用场景,赋能实现自动驾驶和自主交通。
点击观看 OpenV2X 相关视频:https://www.bilibili.com/video/BV1Hu411s73j/
特别感谢
- 感谢联通智网科技有限公司在 OpenV2X Columbia 版本开发过程中给予社区的大力支持以及对社区技术活动的积极参与。联通智网科技对 Columbia 版本多语言的算法模块的设计提出了宝贵建议,并牵头社区面向 V2X 的场景库建设。OpenV2X Columbia 版本将会落地亦庄车路协同研发测试基地,成立 OpenV2X-5G 车路协同开源项目测试床,依托北京亦庄基地,完成 OpenV2X 发布版本的测试验证。OpenV2X 社区真诚期待在 OpenV2X 后续版本开发中,联通智网科技可以继续支持开 OpenV2X 社区,推动 OpenV2X 开源平台的发展。
- 感谢中电信数字城市科技有限公司在 OpenV2X Columbia 版本开发过程中给予社区的大力支持。中电信数字城市基于 OpenV2X 平台开发的 Map 数据生成工具开源并贡献到 OpenV2X 社区(基于高德地图和高精度地图数据打点计算 map 数据,并转换为各类坐标系),并规划成立融合感知技术联合实验室,推动融合感知算法开发。中电信数字城市科技有限公司的小伙伴为社区的开发同学持续提供丰富和宝贵的真实道路数据集,为 OpenV2X 的顺利开发提供了重要的支持。
- 感谢舜泰汽车对社区的大力支持。
- 感谢东南大学交通学院李志斌教授和冯汝怡博士积极参加社区活动和技术分享。
- 感谢九州云对 OpenV2X 产品开发的贡献和社区运营的支持。
- 感谢中新天津生态城智慧城市发展局对 OpenV2X 社区发展的宝贵建议和合作交流。
- 感谢 EMQ 杭州映云科技对 OpenV2X 社区技术活动的支持。
- 感谢 IMT-2020(5G)推进组蜂窝车联(C-V2X)工作组邀请 OpenV2X 社区参加第二十四次全体大会,并进行《OpenV2X 车路协同开源项目介绍》的分享,与来自企业、学术、科研等领域的专家、嘉宾一同探讨、挖掘人、车、路数字化价值,助力交通产业智慧化升级。
相关链接
- Github 地址:https://github.com/open-v2x
- Gitee 地址:https://gitee.com/open-v2x
- OpenV2X All-in-One 部署文档:https://github.com/open-v2x/docs/blob/columbia/docs/v2x-quick-install.md
- OpenV2X 用户快速操作手册:https://github.com/open-v2x/docs/blob/columbia/docs/v2x-quick-start.md
- 开发者指南:https://github.com/open-v2x/docs/blob/master/docs/v2x_developer_guide-zh_CN.md
更多信息请关注 OpenV2X 官方网站: https://openv2x.org
